INDUCTION MOTOR
One of the most common electrical motor used in most applications which is known as induction motor. This motor is also called as asynchronous motor because it runs at a speed less than its synchronous speed.
Here we need to define what is synchronous speed. Synchronous speed is the speed of rotation of the magnetic field in a rotary machine and it depends upon the frequency and number poles of the machine. An induction motor always runs at a speed less than synchronous speed because the rotating magnetic field which is produced in the stator will generate flux in the rotor which will make the rotor to rotate, but due to the lagging of flux current in the rotor with flux current in the stator, the rotor will never reach to its rotating magnetic field speed i.e. the synchronous speed.
Here we need to define what is synchronous speed. Synchronous speed is the speed of rotation of the magnetic field in a rotary machine and it depends upon the frequency and number poles of the machine. An induction motor always runs at a speed less than synchronous speed because the rotating magnetic field which is produced in the stator will generate flux in the rotor which will make the rotor to rotate, but due to the lagging of flux current in the rotor with flux current in the stator, the rotor will never reach to its rotating magnetic field speed i.e. the synchronous speed.
There are basically two types of induction motor that depend upon the input supply - single phase induction motor and three phase inducton motor. Single phase induction motor is not a self starting motor which we will discuss later and three phase induction motoris a self-starting motor.
Working Principle of Induction Motor
We need to give double excitation to make a machine to rotate. For example if we consider a DC motor, we will give one supply to the stator and another to the rotor through brush arrangement. But in induction motor we give only one supply, so it is really interesting to know that how it works. It is very simple, from the name itself we can understand that induction process is involved. Actually when we are giving the supply to the stator winding, flux will generate in the coil due to flow of current in the coil. Now the rotor winding is arranged in such a way that it becomes short circuited in the rotor itself. The flux from the stator will cut the coil in the rotor and since the rotor coils are short circuited, according to Faraday's law of electromagnetic induction, current will start flowing in the coil of the rotor. When the current will flow, another flux will get generated in the rotor. Now there will be two flux, one is stator flux and another is rotor flux and the rotor flux will be lagging w.r.t to the stator flux. Due to this, the rotor will feel a torque which will make the rotor to rotate in the direction of rotating magnetic flux. So the speed of the rotor will be depending upon the ac supply and the speed can be controlled by varying the input supply. This is the working principle of an induction motor of either type – single and three phase. .Types Induction Motor
- Single Phase Induction Motor
- Split phase induction motor
- Capacitor start induction motor
- Capacitor start capacitor run induction motor
- Shaded pole induction motor
- Squirrel cage induction motor
- Slip ring induction motor
- It will be having only one phase still it makes the rotor to rotate, so it is quite interesting. Before that we need to know why single phase induction motor is not a self starting motor and how the problem is overcome. We know that the AC supply is a sinusoidal wave and it produces pulsating magnetic field in uniformly distributed stator winding. Since pulsating magnetic field can be assumed as two oppositely rotating magnetic fields, there will be no resultant torque produced at the starting and due to this the motor does not run. After giving the supply, if the rotor is made to rotate in either direction by external force, then the motor will start to run. This problem has been solved by making the stator winding into two winding, one is main winding and another is auxiliary winding and a capacitor is fixed in series with the auxiliary winding. This will make a phase difference when current will flow through the both coils. When there will be phase difference, the rotor will generate a starting torque and it will start to rotate. Practically we can see that the fan does not rotate when the capacitor is disconnected from the motor but if we rotate with hand it will start to rotate. So this is the reason of using capacitor in the single phase induction motor. There are several advantages of induction motor which makes this motor to have wider application. It is having good efficiency up to 97%. But the speed of the motor varies with the load given to the motor which is an disadvantage of this motor. The direction of rotation of induction motor can easily be changed by changing the sequence of three phase supply, i.e. if RYB is in forward direction, the RBY will make the motor to rotate in reverse direction. This is in the case of three phase motor but in single phase motor, the direction can be reversed by reversing the capacitor terminals in the winding.
- Three Phase Induction Motor
Why is Three Phase Induction Motor Self Starting?
In three phase system, there are three single phase line with 120o phase difference. So the rotating magnetic field is having the same phase difference which will make the rotor to move. If we consider three phases a, b and c, when phase a is magnetized, the rotor will move towards the phase a winding a, in the next moment phase b will get magnetized and it will attract the rotor and then phase c. So the rotor will continue to rotate.Why Single Phase Induction Motor is not Self Starting?
Working Principle of Three Phase Induction Motor
For better understanding the principle of three phase induction motor, the basic constructional feature of this motor must be known to us. This Motor consists of two major parts:
Stator:
Stator of three phase induction motor is made up of numbers of slots to construct a 3 phase winding circuit which is connected to 3 phase AC source. The three phase winding are arranged in such a manner in the slots that they produce a rotating magnetic field after 3Ph.
Rotor:
Rotor of three phase induction motor consists of cylindrical laminated core with parallel slots that can carry conductors. Conductors are heavy copper or aluminum bars which fits in each slots & they are short circuited by the end rings. The slots are not exactly made parallel to the axis of the shaft but are slotted a little skewed because this arrangement reduces magnetic humming noise & can avoid stalling of motor.
Rotor of three phase induction motor consists of cylindrical laminated core with parallel slots that can carry conductors. Conductors are heavy copper or aluminum bars which fits in each slots & they are short circuited by the end rings. The slots are not exactly made parallel to the axis of the shaft but are slotted a little skewed because this arrangement reduces magnetic humming noise & can avoid stalling of motor.
Working of Three Phase Induction Motor
Production of Rotating Magnetic Field
The stator of the motor consists of overlapping winding offset by an electrical angle of 120°. When the primary winding or the stator is connected to a 3 phase AC source, it establishes a rotating magnetic field which rotates at the synchronous speed.Secrets Behind the Rotation:
According to Faraday's law
an emf induced in any circuit is due to the rate of change of magnetic flux linkage through the circuit. As the rotor winding in an induction motor are either closed through an external resistance or directly shorted by end ring, and cut the stator rotating magnetic field, an emf is induced in the rotor copper bar and due to this emf a current flows through the rotor conductor.
Here the relative speed between the rotating flux and static rotor conductor is the cause of current generation; hence as per Lenze's law the rotor will rotate in the same direction to reduce the cause i.e. the relative velocity.
Thus from the working principle of three phase induction motor it may observed that the rotor speed should not reach the synchronous speed produced by the stator. If the speeds equals, there would be no such relative speed, so no emf induced in the rotor, and no current would be flowing, and therefore no torque would be generated. Consequently the rotor can not reach the synchronous speed. The difference between the stator (synchronous speed) and rotor speeds is called the slip. The rotation of the magnetic field in an induction motor has the advantage that no electrical connections need to be made to the rotor. Thus the three phase induction motor is:
- Self-starting.
- Less armature reaction and brush sparking because of the absence of commutators and brushes that may cause sparks.
- Robust in construction.
- Economical.
Types of Three Phase Induction Motor
Induction motor is also called asynchronous motor as it runs at a speed other than the synchronous speed. Like any other electrical motor, induction motor have two main parts namely rotor and stator.
Stator
As the name indicates stator is a stationary part of induction motor. A three phase supply is given to the stator of induction motor.Rotor
The rotor is a rotating part of induction motor. The rotor is connected to the mechanical load through the shaft. The rotor of the three phase induction motor are further classified as-
- Squirrel cage rotor,
- Slip ring rotor or wound rotor or phase wound rotor.
Depending upon the type of rotor used the three phase induction motor are classified as-
- Squirrel cage induction motor
- Slip ring induction motor or wound induction motor or phase wound induction motor
The construction of stator for both the kind of three phase induction motor remains the same and is discussed in brief in next paragraph.
Stator of Three Phase Induction Motor
The stator of the three phase induction motor consists of three main parts:
- Stator frame
- Stator core
- Stator winding or field winding
- Stator Frame:
It is the outer most part of the three phase induction motor. Its main function is to support the stator core and the field winding. It acts as a covering and provide protection and mechanical strength to all the inner parts of the machine. The frame is either made up of die cast or fabricated steel. The frame of three phase induction motor should be very strong and rigid as the air gap length of three phase induction motor is very small, otherwise rotor will not remain concentric with stator which will give rise to unbalanced magnetic pull.
- Stator Core :
The main function of the stator core is to carry alternating flux. In order to reduce the eddy current losses the stator core is laminated. This laminated type of structure is made up of stamping which is about 0.4 to 0.5 mm thick. All the stamping are stamped together to form stator core, which is then housed in stator frame. The stampings are generally made up of silicon steel, which reduces the hysterisis loss.
- Stator Winding or Field Winding :
The slots on the periphery of stator core of the three phase induction motor carries three phase windings. This three phase winding is supplied by three phase ac supply. The three phases of the winding are connected either in star or delta depending upon which type of starting method is used. The squirrel cage motor is mostly started by star-delta stater and hence the stator of squirrel cage motor are delta connected. The slip ring three phase induction motor are started by inserting resistance so, the stator winding can be connected either in star or delta. The winding wound on the stator of three phase induction motor is also called field winding and when this winding is excited by three phase ac supply it produces rotating magnetic field.
It is the outer most part of the three phase induction motor. Its main function is to support the stator core and the field winding. It acts as a covering and provide protection and mechanical strength to all the inner parts of the machine. The frame is either made up of die cast or fabricated steel. The frame of three phase induction motor should be very strong and rigid as the air gap length of three phase induction motor is very small, otherwise rotor will not remain concentric with stator which will give rise to unbalanced magnetic pull.
The main function of the stator core is to carry alternating flux. In order to reduce the eddy current losses the stator core is laminated. This laminated type of structure is made up of stamping which is about 0.4 to 0.5 mm thick. All the stamping are stamped together to form stator core, which is then housed in stator frame. The stampings are generally made up of silicon steel, which reduces the hysterisis loss.
The slots on the periphery of stator core of the three phase induction motor carries three phase windings. This three phase winding is supplied by three phase ac supply. The three phases of the winding are connected either in star or delta depending upon which type of starting method is used. The squirrel cage motor is mostly started by star-delta stater and hence the stator of squirrel cage motor are delta connected. The slip ring three phase induction motor are started by inserting resistance so, the stator winding can be connected either in star or delta. The winding wound on the stator of three phase induction motor is also called field winding and when this winding is excited by three phase ac supply it produces rotating magnetic field.
Torque Equation of Three Phase Induction Motor
The torque produced by three phase induction motor depends upon the following three factors:
Firstly the magnitude of rotor current, secondly the flux which interact with the rotor of three phase induction motor and is responsible for producing emf in the rotor part of induction motor, lastly the power factor of rotor of the three phase induction motor.
Combining all these factors together we get the equation of torque as- Where, T is the torque produced by induction motor,
Where, T is the torque produced by induction motor,
φ is flux responsible for producing induced emf,
I2 is rotor current,
cosθ2 is the power factor of rotor circuit.
The flux φ produced by the stator is proportional to stator emf E1.
i.e φ ∝ E1
We know that transformation ratio K is defined as the ratio of secondary voltage (rotor voltage) to that of primary voltage (stator voltage). Rotor current I2 is defined as the ratio of rotor induced emf under running condition , sE2 to total impedance, Z2 of rotor side,
Rotor current I2 is defined as the ratio of rotor induced emf under running condition , sE2 to total impedance, Z2 of rotor side, and total impedance Z2 on rotor side is given by ,
and total impedance Z2 on rotor side is given by , Putting this value in above equation we get,
Putting this value in above equation we get, s = slip of Induction motor
s = slip of Induction motor
We know that power factor is defined as ratio of resistance to that of impedance. The power factor of the rotor circuit is Putting the value of flux φ, rotor current I2, power factor cosθ2 in the equation of torque we get,
Putting the value of flux φ, rotor current I2, power factor cosθ2 in the equation of torque we get, Combining similar term we get,
Combining similar term we get, Removing proportionality constant we get,
Removing proportionality constant we get, Where, ns is synchronous speed in r. p. s, ns = Ns / 60. So, finally the equation of torque becomes,
Where, ns is synchronous speed in r. p. s, ns = Ns / 60. So, finally the equation of torque becomes, Derivation of K in torque equation.
Derivation of K in torque equation.
In case of three phase induction motor, there occur copper losses in rotor. These rotor copper losses are expressed as
Pc = 3I22R2
We know that rotor current, Substitute this value of I2 in the equation of rotor copper losses, Pc. So, we get
Substitute this value of I2 in the equation of rotor copper losses, Pc. So, we get The ratio of P2 : Pc : Pm = 1 : s : (1 - s)
The ratio of P2 : Pc : Pm = 1 : s : (1 - s)
Where, P2 is the rotor input,
Pc is the rotor copper losses,
Pm is the mechanical power developed. Substitute the value of Pc in above equation we get,
Substitute the value of Pc in above equation we get, On simplifying we get,
On simplifying we get, The mechanical power developed Pm = Tω,
The mechanical power developed Pm = Tω, Substituting the value of Pm
Substituting the value of Pm We know that the rotor speed N = Ns(1 - s)
We know that the rotor speed N = Ns(1 - s)
Substituting this value of rotor speed in above equation we get, Ns is speed in revolution per minute (rpm) and ns is speed in revolution per sec (rps) and the relation between the two is
Ns is speed in revolution per minute (rpm) and ns is speed in revolution per sec (rps) and the relation between the two is Substitute this value of Ns in above equation and simplifying it we get
Substitute this value of Ns in above equation and simplifying it we get Comparing both the equations, we get, constant K = 3 / 2πns
Comparing both the equations, we get, constant K = 3 / 2πns
Firstly the magnitude of rotor current, secondly the flux which interact with the rotor of three phase induction motor and is responsible for producing emf in the rotor part of induction motor, lastly the power factor of rotor of the three phase induction motor.
Combining all these factors together we get the equation of torque as-
Where, T is the torque produced by induction motor,φ is flux responsible for producing induced emf,
I2 is rotor current,
cosθ2 is the power factor of rotor circuit.
The flux φ produced by the stator is proportional to stator emf E1.
i.e φ ∝ E1
We know that transformation ratio K is defined as the ratio of secondary voltage (rotor voltage) to that of primary voltage (stator voltage).Rotor current I2 is defined as the ratio of rotor induced emf under running condition , sE2 to total impedance, Z2 of rotor side,and total impedance Z2 on rotor side is given by ,Putting this value in above equation we get,s = slip of Induction motor
We know that power factor is defined as ratio of resistance to that of impedance. The power factor of the rotor circuit isPutting the value of flux φ, rotor current I2, power factor cosθ2 in the equation of torque we get,Combining similar term we get,Removing proportionality constant we get,Where, ns is synchronous speed in r. p. s, ns = Ns / 60. So, finally the equation of torque becomes,Derivation of K in torque equation.
In case of three phase induction motor, there occur copper losses in rotor. These rotor copper losses are expressed as
Pc = 3I22R2
We know that rotor current,Substitute this value of I2 in the equation of rotor copper losses, Pc. So, we getThe ratio of P2 : Pc : Pm = 1 : s : (1 - s)
Where, P2 is the rotor input,
Pc is the rotor copper losses,
Pm is the mechanical power developed.Substitute the value of Pc in above equation we get,On simplifying we get,The mechanical power developed Pm = Tω,Substituting the value of PmWe know that the rotor speed N = Ns(1 - s)
Substituting this value of rotor speed in above equation we get,Ns is speed in revolution per minute (rpm) and ns is speed in revolution per sec (rps) and the relation between the two isSubstitute this value of Ns in above equation and simplifying it we getComparing both the equations, we get, constant K = 3 / 2πns
i.e φ ∝ E1
We know that transformation ratio K is defined as the ratio of secondary voltage (rotor voltage) to that of primary voltage (stator voltage).
Rotor current I2 is defined as the ratio of rotor induced emf under running condition , sE2 to total impedance, Z2 of rotor side,and total impedance Z2 on rotor side is given by ,Putting this value in above equation we get,s = slip of Induction motorWe know that power factor is defined as ratio of resistance to that of impedance. The power factor of the rotor circuit is
Putting the value of flux φ, rotor current I2, power factor cosθ2 in the equation of torque we get,Combining similar term we get,Removing proportionality constant we get,Where, ns is synchronous speed in r. p. s, ns = Ns / 60. So, finally the equation of torque becomes,Derivation of K in torque equation.In case of three phase induction motor, there occur copper losses in rotor. These rotor copper losses are expressed as
Pc = 3I22R2
We know that rotor current,
Substitute this value of I2 in the equation of rotor copper losses, Pc. So, we getThe ratio of P2 : Pc : Pm = 1 : s : (1 - s)Where, P2 is the rotor input,
Pc is the rotor copper losses,
Pm is the mechanical power developed.
Substitute the value of Pc in above equation we get,On simplifying we get,The mechanical power developed Pm = Tω,Substituting the value of PmWe know that the rotor speed N = Ns(1 - s)Substituting this value of rotor speed in above equation we get,
Ns is speed in revolution per minute (rpm) and ns is speed in revolution per sec (rps) and the relation between the two isSubstitute this value of Ns in above equation and simplifying it we getComparing both the equations, we get, constant K = 3 / 2πnsEquation of Starting Torque of Three Phase Induction Motor
Starting torque is the torque produced by induction motor when it is started. We know that at start the rotor speed, N is zero. So, the equation of starting torque is easily obtained by simply putting the value of s = 1 in the equation of torque of the three phase induction motor,
So, the equation of starting torque is easily obtained by simply putting the value of s = 1 in the equation of torque of the three phase induction motor, The starting torque is also known as standstill torque.
The starting torque is also known as standstill torque.
So, the equation of starting torque is easily obtained by simply putting the value of s = 1 in the equation of torque of the three phase induction motor,The starting torque is also known as standstill torque.Maximum Torque Condition for Three Phase Induction Motor
In the equation of torque, The rotor resistance, rotor inductive reactance and synchronous speed of induction motor remains constant . The supply voltage to the three phase induction motor is usually rated and remains constant so the stator emf also remains the constant. The transformation ratio is defined as the ratio of rotor emf to that of stator emf. So if stator emf remains constant then rotor emf also remains constant.
The rotor resistance, rotor inductive reactance and synchronous speed of induction motor remains constant . The supply voltage to the three phase induction motor is usually rated and remains constant so the stator emf also remains the constant. The transformation ratio is defined as the ratio of rotor emf to that of stator emf. So if stator emf remains constant then rotor emf also remains constant.
If we want to find the maximum value of some quantity then we have to differentiate that quantity with respect to some variable parameter and then put it equal to zero. In this case we have to find the condition for maximum torque so we have to differentiate torque with respect to some variable quantity which is slip, s in this case as all other parameters in the equation of torque remains constant.
So, for torque to be maximum Now differentiate the above equation by using division rule of differentiation. On differentiating and after putting the terms equal to zero we get,
Now differentiate the above equation by using division rule of differentiation. On differentiating and after putting the terms equal to zero we get, Neglecting the negative value of slip we getSo, when slip s = R2 / X2, the torque will be maximum and this slip is called maximum slip Sm and it is defined as the ratio of rotor resistance to that of rotor reactance.
Neglecting the negative value of slip we getSo, when slip s = R2 / X2, the torque will be maximum and this slip is called maximum slip Sm and it is defined as the ratio of rotor resistance to that of rotor reactance.
NOTE: At starting S = 1, so the maximum starting torque occur when rotor resistance is equal to rotor reactance.
The rotor resistance, rotor inductive reactance and synchronous speed of induction motor remains constant . The supply voltage to the three phase induction motor is usually rated and remains constant so the stator emf also remains the constant. The transformation ratio is defined as the ratio of rotor emf to that of stator emf. So if stator emf remains constant then rotor emf also remains constant.If we want to find the maximum value of some quantity then we have to differentiate that quantity with respect to some variable parameter and then put it equal to zero. In this case we have to find the condition for maximum torque so we have to differentiate torque with respect to some variable quantity which is slip, s in this case as all other parameters in the equation of torque remains constant.
So, for torque to be maximum
Now differentiate the above equation by using division rule of differentiation. On differentiating and after putting the terms equal to zero we get,Neglecting the negative value of slip we getSo, when slip s = R2 / X2, the torque will be maximum and this slip is called maximum slip Sm and it is defined as the ratio of rotor resistance to that of rotor reactance.NOTE: At starting S = 1, so the maximum starting torque occur when rotor resistance is equal to rotor reactance.
Equation of Maximum Torque
The equation of torque is The torque will be maximum when slip s = R2 / X2
The torque will be maximum when slip s = R2 / X2
Substituting the value of this slip in above equation we get the maximum value of torque as, In order to increase the starting torque, extra resistance should be added to the rotor circuit at start and cut out gradually as motor speeds up.
In order to increase the starting torque, extra resistance should be added to the rotor circuit at start and cut out gradually as motor speeds up.
Conclusion
From the above equation it is concluded that
- The maximum torque is directly proportional to square of rotor induced emf at the standstill.
- The maximum torque is inversely proportional to rotor reactance.
- The maximum torque is independent of rotor resistance.
- The slip at which maximum torque occur depends upon rotor resistance, R2. So, by varying the rotor resistance, maximum torque can be obtained at any required slip.
The torque will be maximum when slip s = R2 / X2Substituting the value of this slip in above equation we get the maximum value of torque as,
In order to increase the starting torque, extra resistance should be added to the rotor circuit at start and cut out gradually as motor speeds up.Conclusion
From the above equation it is concluded that
- The maximum torque is directly proportional to square of rotor induced emf at the standstill.
- The maximum torque is inversely proportional to rotor reactance.
- The maximum torque is independent of rotor resistance.
- The slip at which maximum torque occur depends upon rotor resistance, R2. So, by varying the rotor resistance, maximum torque can be obtained at any required slip.
Single Phase Induction Motor
Single phase power system is widely used as compared to three phase system for domestic purpose, commercial purpose and to some extent in industrial purpose. As the single phase system is more economical and the power requirement in most of the houses, shops, offices are small, which can be easily met by single phase system. The single phase motors are simple in construction, cheap in cost, reliable and easy to repair and maintain. Due to all these advantages the single phase motor finds its application in vacuum cleaner, fans, washing machine, centrifugal pump, blowers, washing machine, small toys etc.
The single phase AC motors are further classified as:
- Single phase induction motors or asynchronous motors.
- Single phase synchronous motors.
- Commutator motors.
Construction of Single Phase Induction Motor
Like any other electrical motor asynchronous motor also have two main parts namely rotor and stator.Stator:
As its name indicates stator is a stationary part of induction motor. A single phase AC supply is given to the stator of single phase induction motor.
Rotor:
The rotor is a rotating part of induction motor. The rotor is connected to the mechanical load through the shaft. The rotor in single phase induction motor is of squirrel cage rotor type.
The construction of single phase induction motor is almost similar to the squirrel cage three phase motor except that in case of asynchronous motor the stator have two windings instead of one as compare to the single stator winding in three phase induction motor.
Stator of Single Phase Induction Motor
The stator of the single phase induction motor has laminated stamping to reduce eddy current losses on its periphery. The slots are provided on its stamping to carry stator or main winding. In order to reduce the hysteresis losses, stamping are made up of silicon steel. When the stator winding is given a single phase AC supply, the magnetic field is produced and the motor rotates at a speed slightly less than the synchronous speed Ns which is given by Where,
Where,f = supply voltage frequency,
P = No. of poles of the motor.
The construction of the stator of asynchronous motor is similar to that of three phase induction motor except there are two dissimilarity in the winding part of the single phase induction motor.
- Firstly the single phase induction motors are mostly provided with concentric coils. As the number of turns per coil can be easily adjusted with the help of concentric coils, the mmf distribution is almost sinusoidal.
- Except for shaded pole motor, the asynchronous motor has two stator windings namely the main winding and the auxiliary winding. These two windings are placed in space quadrature with respect to each other.
- Split phase induction motor,
- Capacitor start inductor motor,
- Capacitor start capacitor run induction motor,
- Shaded pole induction motor.
- Permanent split capacitor motor or single value capacitor motor.
- Single phase induction motor are simple in construction, reliable and economical for small power rating as compared to three phase induction motors.
- The electrical power factor of single phase induction motors is low as compared to three phase induction motors.
- For same size, the single phase induction motors develop about 50% of the output as that of three phase induction motors.
- The starting torque is also low for asynchronous motors / single phase induction motor.
- The efficiency of single phase induction motors is less as compare it to the three phase induction motors.
Rotor of Single Phase Induction Motor
The construction of the rotor of the single phase induction motor is similar to the squirrel cage three phase induction motor. The rotor is cylindrical in shape and has slots all over its periphery. The slots are not made parallel to each other but are bit skewed as the skewing prevents magnetic locking of stator and rotor teeth and makes the working of induction motor more smooth and quieter i.e less noise. The squirrel cage rotor consists of aluminum, brass or copper bars. These aluminum or copper bars are called rotor conductors and are placed in the slots on the periphery of the rotor. The rotor conductors are permanently shorted by the copper or aluminum rings called the end rings. In order to provide mechanical strength these rotor conductor are braced to the end ring and hence form a complete closed circuit resembling like a cage and hence got its name as squirrel cage induction motor. As the bars are permanently shorted by end rings, the rotor electrical resistance is very small and it is not possible to add external resistance as the bars are permanently shorted. The absence of slip ring and brushes make the construction of single phase induction motorvery simple and robust.Working Principle of Single Phase Induction Motor
NOTE: We know that for the working of any electrical motor whether its AC or DC motor, we require two fluxes as, the interaction of these two fluxes produced the required torque, which is desired parameter for any motor to rotate.When single phase AC supply is given to the stator winding of single phase induction motor, the alternating current starts flowing through the stator or main winding. This alternating current produces an alternating flux called main flux. This main flux also links with the rotor conductors and hence cut the rotor conductors. According to the Faraday's law of electromagnetic induction, emf gets induced in the rotor. As the rotor circuit is closed one so, the current starts flowing in the rotor. This current is called the rotor current. This rotor current produces its own flux called rotor flux. Since this flux is produced due to induction principle so, the motor working on this principle got its name as induction motor. Now there are two fluxes one is main flux and another is called rotor flux. These two fluxes produce the desired torque which is required by the motor to rotate.
Why Single Phase Induction Motor is not Self Starting?
According to double field revolving theory, any alternating quantity can be resolved into two components, each component have magnitude equal to the half of the maximum magnitude of the alternating quantity and both these component rotates in opposite direction to each other. For example - a flux, φ can be resolved into two components Each of these components rotates in opposite direction i. e if one φm / 2 is rotating in clockwise direction then the other φm / 2 rotates in anticlockwise direction.
Each of these components rotates in opposite direction i. e if one φm / 2 is rotating in clockwise direction then the other φm / 2 rotates in anticlockwise direction.When a single phase AC supply is given to the stator winding of single phase induction motor, it produces its flux of magnitude, φm. According to the double field revolving theory, this alternating flux, φm is divided into two components of magnitude φm /2. Each of these components will rotate in opposite direction, with the synchronous speed, Ns. Let us call these two components of flux as forward component of flux, φf and backward component of flux, φb. The resultant of these two component of flux at any instant of time, gives the value of instantaneous stator flux at that particular instant.
 Now at starting, both the forward and backward components of flux are exactly opposite to each other. Also both of these components of flux are equal in magnitude. So, they cancel each other and hence the net torque experienced by the rotor at starting is zero. So, the single phase induction motors are not self starting motors.
Now at starting, both the forward and backward components of flux are exactly opposite to each other. Also both of these components of flux are equal in magnitude. So, they cancel each other and hence the net torque experienced by the rotor at starting is zero. So, the single phase induction motors are not self starting motors.Methods for Making Single Phase Induction as Self Starting Motor
From the above topic we can easily conclude that the single phase induction motors are not self starting because the produced stator flux is alternating in nature and at the starting the two components of this flux cancel each other and hence there is no net torque. The solution to this problem is that if the stator flux is made rotating type, rather than alternating type, which rotates in one particular direction only. Then the induction motor will become self starting. Now for producing this rotating magnetic field we require two alternating flux, having some phase difference angle between them. When these two fluxes interact with each other they will produce a resultant flux. This resultant flux is rotating in nature and rotates in space in one particular direction only. Once the motor starts running, the additional flux can be removed. The motor will continue to run under the influence of the main flux only. Depending upon the methods for making asynchronous motor as Self Starting Motor, there are mainly four types of single phase induction motor namely,Comparison between Single Phase and Three Phase Induction Motors
Types of Single Phase Induction Motor
The single phase induction motor are made self starting by providing an additional flux by some additional means. Now depending upon these additional means the single phase induction motors are classified as:
- Split phase induction motor.
- Capacitor start inductor motor.
- Capacitor start capacitor run induction motor (two value capacitor method).
- Permanent split capacitor (PSC) motor .
- Shaded pole induction motor.
Split Phase Induction Motor
In addition to the main winding or running winding, the stator of single phase induction motor carries another winding called auxiliary winding or starting winding. A centrifugal switch is connected in series with auxiliary winding. The purpose of this switch is to disconnect the auxiliary winding from the main circuit when the motor attains a speed up to 75 to 80% of the synchronous speed. We know that the running winding is inductive in nature. Our aim is to create the phase difference between the two winding and this is possible if the starting winding carries high resistance. Let us sayIrun is the current flowing through the main or running winding,
Istart is the current flowing in starting winding,
and VT is the supply voltage.
 We know that for highly resistive winding the current is almost in phase with the voltage and for highly inductive winding the current lag behind the voltage by large angle. The starting winding is highly resistive so, the current flowing in the starting winding lags behind the applied voltage by very small angle and the running winding is highly inductive in nature so, the current flowing in running winding lags behind applied voltage by large angle. The resultant of these two current is IT. The resultant of these two current produce rotating magnetic field which rotates in one direction. In split phase induction motor the starting and main current get splitted from each other by some angle so this motor got its name as split phase induction motor.
We know that for highly resistive winding the current is almost in phase with the voltage and for highly inductive winding the current lag behind the voltage by large angle. The starting winding is highly resistive so, the current flowing in the starting winding lags behind the applied voltage by very small angle and the running winding is highly inductive in nature so, the current flowing in running winding lags behind applied voltage by large angle. The resultant of these two current is IT. The resultant of these two current produce rotating magnetic field which rotates in one direction. In split phase induction motor the starting and main current get splitted from each other by some angle so this motor got its name as split phase induction motor.Applications of Split Phase Induction Motor
Split phase induction motors have low starting current and moderate starting torque. So these motors are used in fans, blowers, centrifugal pumps, washing machine, grinder, lathes, air conditioning fans, etc. These motors are available in the size ranging from 1 / 20 to 1 / 2 KW.Capacitor Start IM and Capacitor Start Capacitor Run IM
 The working principle and construction of Capacitor start inductor motors and capacitor start capacitor run induction motors are almost the same. We already know that single phase induction motor is not self starting because the magnetic field produced is not rotating type. In order to produce rotating magnetic field there must be some phase difference. In case of split phase induction motor we use resistance for creating phase difference but here we use capacitor for this purpose. We are familiar with this fact that the current flowing through the capacitor leads the voltage. So, in capacitor start inductor motor and capacitor start capacitor run induction motor we are using two winding, the main winding and the starting winding. With starting winding we connect a capacitor so the current flowing in the capacitor i.e Ist leads the applied voltage by some angle, φst.
The working principle and construction of Capacitor start inductor motors and capacitor start capacitor run induction motors are almost the same. We already know that single phase induction motor is not self starting because the magnetic field produced is not rotating type. In order to produce rotating magnetic field there must be some phase difference. In case of split phase induction motor we use resistance for creating phase difference but here we use capacitor for this purpose. We are familiar with this fact that the current flowing through the capacitor leads the voltage. So, in capacitor start inductor motor and capacitor start capacitor run induction motor we are using two winding, the main winding and the starting winding. With starting winding we connect a capacitor so the current flowing in the capacitor i.e Ist leads the applied voltage by some angle, φst.
The running winding is inductive in nature so, the current flowing in running winding lags behind applied voltage by an angle, φm. Now there occur large phase angle differences between these two currents which produce an resultant current, I and this will produce a rotating magnetic field. Since the torque produced by these motors depends upon the phase angle difference, which is almost 90o. So, these motors produce very high starting torque. In case of capacitor start induction motor, the centrifugal switch is provided so as to disconnect the starting winding when the motor attains a speed up to 75 to 80% of the synchronous speed but in case of capacitor start capacitors run induction motor there is no centrifugal switch so, the >capacitor remains in the circuit and helps to improve the power factor and the running conditions of single phase induction motor.
Application of Capacitor Start IM and Capacitor Start Capacitor Run IM
These motors have high starting torque hence they are used in conveyors, grinder, air conditioners, compressor, etc. They are available up to 6 KW.Permanent Split Capacitor (PSC) Motor
It has a cage rotor and stator. Stator has two windings – main and auxiliary winding. It has only one capacitor in series with starting winding. It has no starting switch.Advantages and Applications
No centrifugal switch is needed. It has higher efficiency and pull out torque. It finds applications in fans and blowers in heaters and air conditioners. It is also used to drive office machinery.
Shaded Pole Single Phase Induction Motors
 The stator of the shaded pole single phase induction motor has salient or projected poles. These poles are shaded by copper band or ring which is inductive in nature. The poles are divided into two unequal halves. The smaller portion carries the copper band and is called as shaded portion of the pole.
The stator of the shaded pole single phase induction motor has salient or projected poles. These poles are shaded by copper band or ring which is inductive in nature. The poles are divided into two unequal halves. The smaller portion carries the copper band and is called as shaded portion of the pole.
ACTION: When a single phase supply is given to the stator of shaded pole induction motor an alternating flux is produced. This change of flux induces emf in the shaded coil. Since this shaded portion is short circuited, the current is produced in it in such a direction to oppose the main flux. The flux in shaded pole lags behind the flux in the unshaded pole. The phase difference between these two fluxes produces resultant rotating flux.
We know that the stator winding current is alternating in nature and so is the flux produced by the stator current. In order to clearly understand the working of shaded pole induction motor consider three regions-
We know that the stator winding current is alternating in nature and so is the flux produced by the stator current. In order to clearly understand the working of shaded pole induction motor consider three regions-
- When the flux changes its value from zero to nearly maximum positive value.
- When the flux remains almost constant at its maximum value.
- When the flux decreases from maximum positive value to zero.
REGION 2:
When the flux remains almost constant at its maximum value- In this region the rate of rise of current and hence flux remains almost constant. Hence there is very little induced emf in the shaded portion. The flux produced by this induced emf has no effect on the main flux and hence distribution of flux remains uniform and the magnetic axis lies at the center of the pole.
When the flux remains almost constant at its maximum value- In this region the rate of rise of current and hence flux remains almost constant. Hence there is very little induced emf in the shaded portion. The flux produced by this induced emf has no effect on the main flux and hence distribution of flux remains uniform and the magnetic axis lies at the center of the pole.
REGION 3:
When the flux decreases from maximum positive value to zero - In this region the rate of decrease in the flux and hence current is very high. According to Faraday's law whenever there is change in flux emf gets induced. Since the copper band is short circuit the current starts flowing in the copper band due to this induced emf. This current in copper band produces its own flux. Now according to Lenz's law the direction of the current in copper band is such that it opposes its own cause i.e decrease in current. So the shaded ring flux aids the main flux, which leads to the crowding of flux in shaded part of stator and the flux weaken in non shaded part. This non uniform distribution of flux causes magnetic axis to shift in the middle of the shaded part of the pole.
This shifting of magnetic axis continues for negative cycle also and leads to the production of rotating magnetic field. The direction of this field is from non shaded part of the pole to the shaded part of the pole.
When the flux decreases from maximum positive value to zero - In this region the rate of decrease in the flux and hence current is very high. According to Faraday's law whenever there is change in flux emf gets induced. Since the copper band is short circuit the current starts flowing in the copper band due to this induced emf. This current in copper band produces its own flux. Now according to Lenz's law the direction of the current in copper band is such that it opposes its own cause i.e decrease in current. So the shaded ring flux aids the main flux, which leads to the crowding of flux in shaded part of stator and the flux weaken in non shaded part. This non uniform distribution of flux causes magnetic axis to shift in the middle of the shaded part of the pole.
This shifting of magnetic axis continues for negative cycle also and leads to the production of rotating magnetic field. The direction of this field is from non shaded part of the pole to the shaded part of the pole.
Advantages and Disadvantages of Shaded Pole Motor
The advantages of shaded pole induction motor are- Very economical and reliable.
- Construction is simple and robust because there is no centrifugal switch.
- Low power factor.
- The starting torque is very poor.
- The efficiency is very low as, the copper losses are high due to presence of copper band.
- The speed reversal is also difficult and expensive as it requires another set of copper rings.
Applications of Shaded Pole Motor
Applications of Shaded pole motors induction motor are-Due to their low starting torques and reasonable cost these motors are mostly employed in small instruments, hair dryers, toys, record players, small fans, electric clocks etc. These motors are usually available in a range of 1/300 to 1/20 KW.
Equivalent Circuit for an Induction Motor
Induction motor is a well-known device which works on the principle of transformer. So it is also called the rotating transformer. That is, when an EMF is supplied to its stator, then as a result of electromagnetic induction, a voltage is induced in its rotor. So an induction motor is said to be a transformer with rotating secondary. Here, primary of transformer resembles stator winding of an induction motor and secondary resembles rotor.
The induction motor always runs below the synchronous or full load speed and the relative difference between the synchronous speed and speed of rotation is known as slip which is denoted by s. Where, Ns is synchronous speed of rotation which is given by-
Where, Ns is synchronous speed of rotation which is given by- Where, f is the frequency of the supply voltage.
Where, f is the frequency of the supply voltage.
P is the number of poles of the machine.
The induction motor always runs below the synchronous or full load speed and the relative difference between the synchronous speed and speed of rotation is known as slip which is denoted by s.
Where, Ns is synchronous speed of rotation which is given by-Where, f is the frequency of the supply voltage.P is the number of poles of the machine.
Equivalent Circuit
The equivalent circuit of any machine shows the various parameter of the machine such as its Ohmic losses and also other losses. The losses are modeled just by inductor and resistor. The copper losses are occurred in the windings so the winding resistance is taken into account. Also, the winding has inductance for which there is a voltage drop due to inductive reactance and also a term called power factor comes into the picture. There are two types of equivalent circuits in case of a three-phase induction motor-Exact Equivalent Circuit
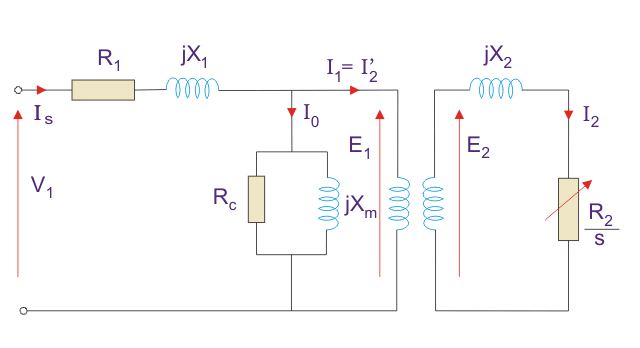 Here, R1 is the winding resistance of the stator.
Here, R1 is the winding resistance of the stator.X1 is the inductance of the stator winding.
Rc is the core loss component.
XM is the magnetizing reactance of the winding.
R2/s is the power of the rotor, which includes output mechanical power and copper loss of rotor.
If we draw the circuit with referred to the stator then the circuit will look like-
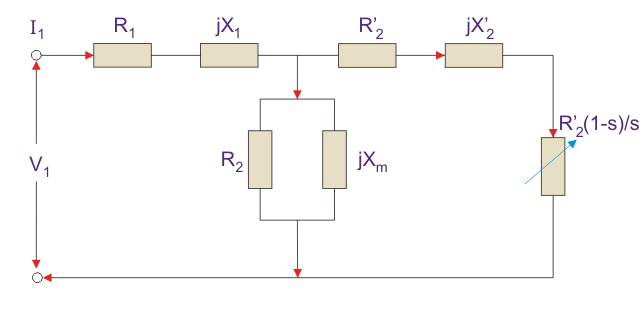 Here all the other parameters are same except-
Here all the other parameters are same except-R2’ is the rotor winding resistance with referred to stator winding.
X2’ is the rotor winding inductance with referred to stator winding.
R2(1 - s) / s is the resistance which shows the power which is converted to mechanical power output or useful power. The power dissipated in that resistor is the useful power output or shaft power.
Approximate Equivalent Circuit
The approximate equivalent circuit is drawn just to simplify our calculation by deleting one node. The shunt branch is shifted towards the primary side. This has been done as the voltage drop between the stator resistance and inductance is less and there is not much difference between the supply voltage and the induced voltage. However, this is not appropriate due to following reasons-- The magnetic circuit of induction motor has an air gap so exciting current is larger compared to transformer so exact equivalent circuit should be used.
- The rotor and stator inductance is larger in induction motor.
- In induction motor, we use distributed windings.
Power Relation of Equivalent Circuit
- Input power to stator- 3 V1I1Cos(Ɵ). Where, V1 is the stator voltage applied. I1 is the current drawn by the stator winding. Cos(Ɵ) is the stator power stator.
- Rotor input- Power input- Stator copper and iron losses.
- Rotor Copper loss = Slip × power input to the rotor.
- Developed Power = (1 - s) × Rotor input power.
Equivalent Circuit of a Single Phase Induction Motor
There is a difference between single phase and three phase equivalent circuits. The single phase induction motor circuit is given by double revolving field theory which states that-A stationary pulsating magnetic field might be resolved into two rotating fields, both having equal magnitude but opposite in direction. So the net torque induced is zero at standstill. Here, the forward rotation is called the rotation with slip s and the backward rotation is given with a slip of (2 - s). The equivalent circuit is-
 In most of the cases the core loss component r0 is neglected as this value is quite large and does not affect much in the calculation.
In most of the cases the core loss component r0 is neglected as this value is quite large and does not affect much in the calculation.Here, Zf shows the forward impedance and Zb shows the backward impedance.
Also, the sum of forward and backward slip is 2 so in case of backward slip, it is replaced by (2 - s).
R1 = Resistance of stator winding.
X1 = Inductive reactance of the stator winding.
Xm = Magnetising reactance.
R2’ = Rotor Reactance with referred to stator.
X2’ = Rotor inductive reactance with referred to stator.
Calculation of Power of Equivalent Circuit
- Find Zf and Zb.
- Find stator current which is given by Stator voltage/Total circuit impedance.
- Then find the input power which is given by
Stator voltage × Stator current × Cos(Ɵ)
Where, Ɵ is the angle between the stator current and voltage. - Power Developed (Pg) is the difference between forward field power and backward power. The forward and backward power is given by the power dissipated in the respective resistors.
- The rotor copper loss is given by- slip × Pg.
- Output Power is given by-
Pg - s × Pg - Rotational loss. The rotational losses include friction loss, windage loss, Core loss. - Efficiency can also be calculated by diving output power by input power.
Losses and Efficiency of Induction Motor
There are two types of losses occur in THREE PHASE INDUCTION MOTOR These losses are,
- Constant or fixed losses,
- Variable losses.
Constant or Fixed Losses
Constant losses are those losses which are considered to remain constant over normal working range of induction motor. The fixed losses can be easily obtained by performing no-load test on the three phase induction motor. These losses are further classified as-- Iron or core losses,
- Mechanical losses,
- Brush friction losses.
Iron or Core Losses
Iron or core losses are further divided into hysteresis and eddy current losses. Eddy current losses are minimized by using lamination on core. Since by laminating the core, area decreases and hence resistance increases, which results in decrease in eddy currents. Hysteresis losses are minimized by using high grade silicon steel. The core losses depend upon frequency of the supply voltage. The frequency of stator is always supply frequency, f and the frequency of rotor is slip times the supply frequency, (sf) which is always less than the stator frequency. For stator frequency of 50 Hz, rotor frequency is about 1.5 Hz because under normal running condition slip is of the order of 3 %. Hence the rotor core loss is very small as compared to stator core loss and is usually neglected in running conditions.Mechanical and Brush Friction Losses
Mechanical losses occur at the bearing and brush friction loss occurs in wound rotor induction motor. These losses are zero at start and with increase in speed these losses increases. In three phase induction motor the speed usually remains constant. Hence these losses almost remains constant.Variable Losses
 These losses are also called copper losses. These losses occur due to current flowing in stator and rotor windings. As the load changes, the current flowing in rotor and stator winding also changes and hence these losses also changes. Therefore these losses are called variable losses. The copper losses are obtained by performing blocked rotor test on three phase induction motor.
These losses are also called copper losses. These losses occur due to current flowing in stator and rotor windings. As the load changes, the current flowing in rotor and stator winding also changes and hence these losses also changes. Therefore these losses are called variable losses. The copper losses are obtained by performing blocked rotor test on three phase induction motor.
The main function of induction motor is to convert an electrical power into mechanical power. During this conversion of electrical energy into mechanical energy the power flows through different stages. This power flowing through different stages is shown by power flow diagram. As we all know the input to the three phase motor is three phase supply. So, the three phase supply is given to the stator of three phase induction motor. Let, Pin = electrical power supplied to the stator of three phase induction motor,
VL = line voltage supplied to the stator of three phase induction motor,
IL = line current,
Cosφ = power factor of the three phase induction motor.
Electrical power input to the stator, Pin = √3VLILcosφ
A part of this power input is used to supply stator losses which are stator iron loss and stator copper loss. The remaining power i.e ( input electrical power – stator losses ) are supplied to rotor as rotor input.
So, rotor input P2 = Pin – stator losses (stator copper loss and stator iron loss).
Now, the rotor has to convert this rotor input into mechanical energy but this complete input cannot be converted into mechanical output as it has to supply rotor losses. As explained earlier the rotor losses are of two types rotor iron loss and rotor copper loss. Since the iron loss depends upon the rotor frequency, which is very small when the rotor rotates, so it is usually neglected. So, the rotor has only rotor copper loss. Therefore the rotor input has to supply these rotor copper losses. After supplying the rotor copper losses, the remaining part of Rotor input, P2 is converted into mechanical power, Pm.
VL = line voltage supplied to the stator of three phase induction motor,
IL = line current,
Cosφ = power factor of the three phase induction motor.
Electrical power input to the stator, Pin = √3VLILcosφ
A part of this power input is used to supply stator losses which are stator iron loss and stator copper loss. The remaining power i.e ( input electrical power – stator losses ) are supplied to rotor as rotor input.
So, rotor input P2 = Pin – stator losses (stator copper loss and stator iron loss).
Now, the rotor has to convert this rotor input into mechanical energy but this complete input cannot be converted into mechanical output as it has to supply rotor losses. As explained earlier the rotor losses are of two types rotor iron loss and rotor copper loss. Since the iron loss depends upon the rotor frequency, which is very small when the rotor rotates, so it is usually neglected. So, the rotor has only rotor copper loss. Therefore the rotor input has to supply these rotor copper losses. After supplying the rotor copper losses, the remaining part of Rotor input, P2 is converted into mechanical power, Pm.
Let Pc be the rotor copper loss,
I2 be the rotor current under running condition, R2 is the rotor resistance,
Pm is the gross mechanical power developed.
Pc = 3I22R2
Pm = P2 – Pc
Now this mechanical power developed is given to the load by the shaft but there occur some mechanical losses like friction and windage losses. So, the gross mechanical power developed has to be supplied to these losses. Therefore the net output power developed at the shaft, which is finally given to the load is Pout.
Pout = Pm – Mechanical losses (friction and windage losses).
Pout is called the shaft power or useful power.
I2 be the rotor current under running condition, R2 is the rotor resistance,
Pm is the gross mechanical power developed.
Pc = 3I22R2
Pm = P2 – Pc
Now this mechanical power developed is given to the load by the shaft but there occur some mechanical losses like friction and windage losses. So, the gross mechanical power developed has to be supplied to these losses. Therefore the net output power developed at the shaft, which is finally given to the load is Pout.
Pout = Pm – Mechanical losses (friction and windage losses).
Pout is called the shaft power or useful power.
Efficiency of Three Phase Induction Motor
Efficiency is defined as the ratio of the output to that of input, Rotor efficiency of the three phase induction motor,
Rotor efficiency of the three phase induction motor, = Gross mechanical power developed / rotor input
= Gross mechanical power developed / rotor input Three phase induction motor efficiency,
Three phase induction motor efficiency, Three phase induction motor efficiency
Three phase induction motor efficiency
Torque Slip Characteristics of Induction Motor
Torque Slip Characteristics of Three Phase Induction Motor
The torque slip curve for an induction motor gives us the information about the variation of torque with the slip. The slip is defined as the ratio of difference of synchronous speed and actual rotor speed to the synchronous speed of the machine. The variation of slip can be obtained with the variation of speed that is when speed varies the slip will also vary and the torque corresponding to that speed will also vary.
The curve can be described in three modes of operation- The torque-slip characteristic curve can be divided roughly into three regions:
The torque-slip characteristic curve can be divided roughly into three regions:
The torque-slip characteristic curve can be divided roughly into three regions:- Low slip region
- Medium slip region
- High slip region
In this mode of operation, supply is given to the stator sides and the motor always rotates below the synchronous speed. The induction motor torque varies from zero to full load torque as the slip varies. The slip varies from zero to one. It is zero at no load and one at standstill. From the curve it is seen that the torque is directly proportional to the slip. That is, more is the slip, more will be the torque produced and vice-versa. The linear relationship simplifies the calculation of motor parameter to great extent. Generating Mode
In this mode of operation induction motor runs above the synchronous speed and it should be driven by a prime mover. The stator winding is connected to a three phase supply in which it supplies electrical energy. Actually, in this case, the torque and slip both are negative so the motor receives mechanical energy and delivers electrical energy. Induction motor is not much used as generator because it requires reactive power for its operation. That is, reactive power should be supplied from outside and if it runs below the synchronous speed by any means, it consumes electrical energy rather than giving it at the output. So, as far as possible, induction generator are generally avoided.
Braking Mode
In the Braking mode, the two leads or the polarity of the supply voltage is changed so that the motor starts to rotate in the reverse direction and as a result the motor stops. This method of braking is known as plugging. This method is used when it is required to stop the motor within a very short period of time. The kinetic energy stored in the revolving load is dissipated as heat. Also, motor is still receiving power from the stator which is also dissipated as heat. So as a result of which motor develops enormous heat energy. For this stator is disconnected from the supply before motor enters the braking mode.
If load which the motor drives accelerates the motor in the same direction as the motor is rotating, the speed of the motor may increase more than synchronous speed. In this case, it acts as an induction generator which supplies electrical energy to the mains which tends to slow down the motor to its synchronous speed, in this case the motor stops. This type of breaking principle is called dynamic or regenerative breaking.
Torque Slip Characteristics of Single Phase Induction Motor
 From the figure, we see that at a slip of unity, both forward and backward field develops equal torque but the direction of which are opposite to each other so the net torque produced is zero hence the motor fails to start. From here we can say that these motors are not self starting unlike the case of three phase induction motor. There must be some means to provide the starting torque. If by some means, we can increase the forward speed of the machine due to which the forward slip decreases the forward torque will increase and the reverse torque will decrease as a result of which motor will start.
From the figure, we see that at a slip of unity, both forward and backward field develops equal torque but the direction of which are opposite to each other so the net torque produced is zero hence the motor fails to start. From here we can say that these motors are not self starting unlike the case of three phase induction motor. There must be some means to provide the starting torque. If by some means, we can increase the forward speed of the machine due to which the forward slip decreases the forward torque will increase and the reverse torque will decrease as a result of which motor will start.
From here we can conclude that for starting of single phase induction motor, there should be a production of difference of torque between the forward and backward field. If the forward field torque is larger than the backward field than the motor rotates in forward or anti clockwise direction. If the torque due to backward field is larger compared to other, then the motor rotates in backward or clockwise direction.
Testing of Induction Motor
Demand of energy is growing day by day and along with it cost of energy rising abruptly, so now it is necessary that the health of large motors which consumes maximum power should be taken care off. Tests are required to check the condition of the induction motor and to get the basic idea of malfunctioning of the motor. Now a day lots of techniques and tests are available which gives the complete health card of the induction motors. By monitoring some parameters like voltage, current, temperature, and vibration problem could be diagnosed and by correcting these faults the overall efficiency of the machine can be improved. This will reduce the energy consumption and operational costs.
Basic Parameters to be Checked
CurrentAs line current in all the phases are not equal so the arithmetic mean of the phase currents should be used for evaluating machine performance.
Voltage
voltage is measured at the motor terminals and at the time of test, it should be approximately balanced. Machine performance can be calculated by using average of the phase voltages.
Power
power input to three phase motor can be calculated by a single watt meters as they are connected in two watt meter method.
Resistance
It is necessary to check the ground resistance between the motor body and terminals of the machine.
Tests for Induction Motor
Number of test is done on induction motor to check its different parameters. All the tests are divided into two parts:Preliminary Tests
These tests are performed to check the electrical or mechanical defects of the induction motor.- Firstly check the components of motor like
- Broken rotor bars
- High resistance joints
- Cracked end rings
- No-load running current test
- High potential test
- Air-gap measurement
- Balancing of current
- Temperature rise in bearing
- Voltages in shaft
- Direction of rotation
- Level of noise
- Strength of vibration
- Air gap eccentricity
Performance Tests
The purpose of these tests is to estimate the performance characteristics of the induction motor. Along with preliminary tests, these tests are also done on motor.- No load test
- Locked rotor test
- Breakdown torque load performance test
- Temperature test
- Stray load loss test
- Determination of efficiency test